







Xe tự hành AGV đang trở nên phổ biến hơn trên khắp các nhà máy sản xuất, nhà kho và trung tâm phân phối với mục đích tăng hiệu quả và giảm chi phí trong khâu vận chuyển hàng hóa nội bộ.
Xe tự hành AGV là gì ? Nó là một phương tiện không người lái được sử dụng để vận chuyển sản phẩm, hàng hóa, vật liệu, nguyên liệu trong các ứng dụng đa dạng. Một số trong đó là phục vụ sản xuất, lắp ráp, chọn đơn hàng, kéo và tải rơ moóc hàng từ dây chuyền vào kho lưu trữ… AGV cung cấp cho khách hàng khả năng vận chuyển tải từ các part nhỏ đến pallet nặng tới 500-1000kgs.
Tại sao xe tự hành AGV có thể di chuyển mà không cần người lái?
AGV sử dụng các hình thức điều hướng khác nhau, chẳng hạn như theo băng từ trên sàn nhà, chụp ảnh môi trường xung quanh hoặc sử dụng máy quét laser:
Điều hướng bằng hệ thống dẫn đường dùng dây dẫn
Một khe (mạch sàn được cắt trên mặt sàn) và một dây tín hiệu được đặt sâu khoảng 2cm dưới bề mặt. Khe này được cắt theo đúng con đường mà AGV sẽ đi theo. Dây dẫn được sử dụng để truyền tín hiệu radio. Một cảm biến được lắp đặt ở dưới gầm của AGV, vị trí gần mặt đất nhất. Cảm biến sẽ phát hiện vị trí tương đối của tín hiệu vô tuyến được truyền từ dây. Thông tin này được sử dụng để điều chỉnh mạch lái, làm cho AGV đi theo đúng lộ trình dây tín hiệu được chôn sẵn dưới sàn nhà xưởng. Phương pháp điều hướng bằng dây dẫn (wired) ra đời năm 1954.
.jpg)

Điều hướng bằng hệ thống dẫn đường dùng dây dẫn
Điều hướng bằng hệ thống băng từ dẫn hướng
Sử dụng băng từ dẫn hướng(tap) ra đời năm 1960, hay còn gọi là nam châm cuộn, nam châm dẻo là phương pháp điều hướng xe tự hành AGV phổ biến tại Việt Nam. AGV sử dụng băng từ cho đường dẫn. Các băng có thể là một trong hai loại: loại từ tính hoặc loại màu. AGV được gắn cảm biến dẫn hướng thích hợp để đi theo đường dẫn của băng. Một lợi thế lớn của băng so với dẫn hướng bằng dây dẫn đã nêu ở trên là nó có thể dễ dàng được gỡ bỏ và di dời theo kịch bản khác nếu lộ trình di chuyển từ vị trí cấp hàng tới vị trí sản xuất cần thay đổi. Với tùy chọn sử dụng băng màu, ban đầu ít tốn kém hơn, nhưng thiếu lợi thế khi được nhúng vào các khu vực nhiều người qua lại. Nơi băng có thể bị hỏng hoặc bẩn.
Một thanh dẫn từ linh hoạt cũng có thể được nhúng trong sàn như dây nhưng hoạt động theo cùng một nguyên lý như băng từ. Một ưu điểm khác của băng dẫn hướng từ là cực kép. Các miếng băng từ nhỏ có thể được đặt để thay đổi trạng thái của AGV dựa trên độ phân cực và trình tự của các thẻ.
Hệ thống điều hướng bằng laser
Công nghệ dẫn đường bằng laser sử dụng một số gương phản xạ đặt trên tường/dầm, máy móc dọc theo tuyến đường, theo sau là các phương tiện, cho phép bộ điều khiển tính toán vị trí của xe.

Hệ thống điều hướng bằng laser
AGV mang trên mình một máy phát và máy thu laser trên một tháp quay. Các tia laser được truyền và nhận bởi cùng một cảm biến. Góc và (đôi khi) khoảng cách đến bất kỳ gương phản xạ nào trong tầm nhìn và trong phạm vi được tự động tính toán. Thông tin này được so sánh với bản đồ bố trí gương phản xạ đã được lưu trong bộ nhớ của AGV. Điều này cho phép hệ thống định vị tam giác (xác định vị trí của 1 điểm nhờ vào vị trí giao nhau của 3 đường tròn với bán kính xác đinh) vị trí hiện tại của AGV. Vị trí hiện tại được so sánh với đường dẫn được lập trình trong bản đồ bố trí phản xạ. Điều hướng được điều chỉnh phù hợp để giữ việc theo dõi AGV. Sau đó, nó có thể được điều hướng đến một mục tiêu mong muốn bằng cách sử dụng vị trí cập nhật liên tục. Có những kiểu laser sau:
Laser module
Việc sử dụng ánh sáng laser module cho phạm vi và độ chính xác cao hơn so với các hệ thống laser xung. Bằng cách phát ra liên tục của ánh sáng laser module, một hệ thống có thể thu được phản xạ không bị gián đoạn ngay khi máy quét đạt được đường ngắm bằng gương phản xạ. Sự phản xạ dừng lại ở cạnh đuôi của gương phản xạ, đảm bảo phép đo chính xác và nhất quán từ mọi gương phản xạ trên mỗi lần quét. Bằng cách sử dụng laser module, một hệ thống có thể đạt được độ phân giải góc ~ 0,1 mrad (0,006 °) với 8 vòng quay máy quét mỗi giây.
Laser xung xung
Máy quét laser xung điển hình phát ra ánh sáng laser xung với tốc độ 14.400 Hz, cho độ phân giải tối đa có thể là ~ 3,5 mrad (0,2 °) với 8 vòng quay của máy quét mỗi giây. Để đạt được điều hướng khả thi, các bộ phận đọc phải được nội suy dựa trên cường độ của ánh sáng laser phản xạ, để xác định tâm của gương phản xạ.
Ưu điểm chính của hệ thống laser là không có thiết bị nào liên quan đến vật lý với tuyến đường phải cài đặt thêm (nam châm, vạch sơn, băng từ v.v.). Điều này có nghĩa là một hệ thống dẫn đường bằng laser có thể được sửa đổi dễ dàng bằng phần mềm, đảm bảo mức độ linh hoạt cao nhất trong việc thích ứng với các phát triển trong tương lai có thể có trong nhà máy. Dễ dàng thay đổi theo các kịch bản đường đi theo từng giai đoạn và yêu cầu cấp hàng hóa.
Xem thêm: Công nghệ sẽ thay thế con người hay tạo ra một thế hệ xuất chúng hơn
Điều hướng bằng quán tính
Một hình thức khác của điều hướng AGV là điều hướng quán tính. Với điều hướng quán tính, một hệ thống điều khiển máy tính sẽ điều khiển và phân công nhiệm vụ cho các phương tiện. Bộ tiếp sóng được nhúng trong sàn của nơi làm việc. AGV sử dụng các bộ tiếp sóng này để xác minh rằng chiếc xe đang hoạt động. Một con quay hồi chuyển có thể phát hiện sự thay đổi nhỏ nhất về hướng của chiếc xe tự hành và điều chỉnh nó để giữ AGV luôn đi đúng đường. Biên độ sai số của phương pháp quán tính là ± 25.4mm.

Điều hướng bằng quán tính
Quán tính có thể hoạt động trong hầu hết mọi môi trường kể cả các lối đi chật hẹp hoặc trong điều kiên nhiệt độ khắc nghiệt. Điều hướng quán tính có thể bao gồm việc sử dụng nam châm nhúng trong sàn nhà xưởng mà phương tiện có thể đọc và làm theo.
Trong quy trình tự động với các hệ thống tự động hóa được tích hợp, AGV được lập trình để liên lạc với các robot khác để đảm bảo sản phẩm được di chuyển trơn tru qua kho, cho dù nó được lưu trữ để sử dụng trong tương lai hay được gửi trực tiếp đến các khu vực vận chuyển. Ngày nay, AGV đóng một vai trò quan trọng trong việc thiết kế các nhà máy và kho thông minh, di chuyển hàng hóa một cách an toàn đến đích chính của họ.
Điều hướng xe tự hành mà không trang bị thêm không gian làm việc được gọi là tính năng tự nhiên hoặc điều hướng nhắm mục tiêu tự nhiên (Natural Targeting). Một phương pháp sử dụng một hoặc nhiều cảm biến tìm phạm vi, chẳng hạn như công cụ tìm phạm vi laser, cũng như con quay hồi chuyển hoặc đơn vị đo lường quán tính với kỹ thuật định vị Monte-Carlo / Markov để hiểu nó ở đâu khi nó tự động lên kế hoạch cho con đường ngắn nhất được phép tới nó mục tiêu.
Ưu điểm của các hệ thống như vậy là chúng rất linh hoạt để giao hàng theo yêu cầu đến bất kỳ địa điểm nào. Quá trình xử lý có thể thất bại mà không làm giảm toàn bộ hoạt động sản xuất, vì AGV có thể lập kế hoạch đường dẫn xung quanh thiết bị thất bại nhưng vẫn nhanh chóng cài đặt, với thời gian ít hơn cho nhà máy.
Điều hướng tầm nhìn
AGV có điều hướng tầm nhìn có thể được cài đặt mà không cần sửa đổi môi trường hoặc cơ sở hạ tầng. Chúng hoạt động bằng cách sử dụng máy ảnh để ghi lại các tính năng dọc theo tuyến đường, cho phép AGV phát lại tuyến đường bằng cách sử dụng các tính năng được ghi lại để điều hướng.
Các AGV điều hướng tầm nhìn sử dụng công nghệ Evidence Grid, một ứng dụng của cảm biến thể tích xác suất, được phát minh và phát triển đầu tiên bởi Tiến sĩ Hans Moravec tại Đại học Carnegie Mellon. Công nghệ Evidence Grid sử dụng xác suất chiếm chỗ cho từng điểm trong không gian để bù cho sự không chắc chắn trong hiệu suất của cảm biến và trong môi trường. Các cảm biến điều hướng chính là máy ảnh âm thanh nổi được thiết kế đặc biệt.
AGV dẫn hướng tầm nhìn sử dụng hình ảnh 360 độ và xây dựng bản đồ 3D, cho phép các xe tự hành AGV điều hướng tầm nhìn đi theo lộ trình mà không cần sự trợ giúp của con người hoặc bổ sung các tính năng đặc biệt, cột mốc hoặc hệ thống định vị.
Điều hướng địa lý
Một AGV được định vị địa lý nhận ra môi trường của nó để thiết lập vị trí. Không cần bất kỳ cơ sở hạ tầng nào, xe nâng tự hành được trang bị công nghệ đo lường địa chất sẽ phát hiện và xác định các cột, giá đỡ và tường trong kho. Sử dụng các tham chiếu cố định này, nó có thể định vị chính nó, trong thời gian thực và xác định tuyến đường của nó. Không có giới hạn về khoảng cách để bao gồm số lượng địa điểm đón hoặc thả. Các tuyến đường, kịch bản di chuyển có thể sửa đổi vô hạn.
Hệ thống điều hướng đa năng
Phần mềm đa hướng dẫn được sử dụng khi: vì nhiều lý do, hệ thống dẫn đường laser cần được kết hợp với hệ thống thứ hai (ví dụ: hướng dẫn từ tính).
Tính an toàn khi sử dụng xe tự hành AGV
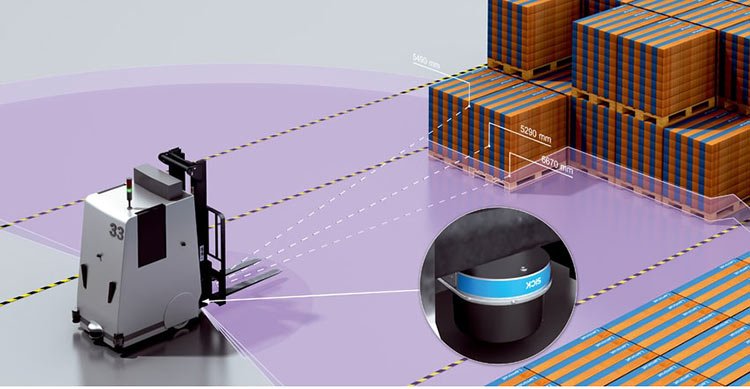
An toàn là ưu tiên hàng đầu trong quá trình phát triển hệ thống xe tự hành AGV của các nhà cung cấp giải pháp tự động hóa trong vận chuyển hàng hóa trong nhà máy. Đó là lý do tại sao các phương tiện tự động được trang bị công nghệ cảm biến toàn diện bảo vệ con người, máy móc và an toàn tải trọng.
Xe tự hành AGV là một mắt xích quan trọng trong các hệ thống vận chuyển hàng hóa trong nhà máy và hệ thống kho của bạn. Hệ thống AGV với khả năng chủ động gần như hoàn toàn làm cho công tác hậu cần nội bộ của bạn tự động tốt hơn bởi vì AGV mang đến cho bạn vô số lợi ích khi chuyển các nhiệm vụ, công việc vận chuyển sang hệ thống xe tự hành.


Tính an toàn khi sử dụng xe tự hành AGV
Trong quá trình di chuyển, mặc dù đã được cài đặt, định nghĩa các lộ trình di chuyển theo ý đồ của con người, nhưng giữa một không gian với rất nhiều thiết bị, máy móc và con người đi lại, việc để xảy ra va chạm giữa xe tự hành với con người, giữa các xe tự hành AGV với nhau là không được xảy ra. Bởi nó sẽ gây ra hỏng hóc hàng hóa, máy móc và đe dọa an toàn của con người.
Đó là lý do tại sao xe tự hành được trang bị cảm biến công nghệ. Cảm biến toàn diện được trang bị ở tất cả các phía cho phép hàng hóa được bảo vệ theo mọi hướng trong quá trình vận hành. Các xe tự hành có khả năng nâng hạ như những xe fork lift mà không cần người lái được trang bị các máy quét và cảm biến. Bao gồm máy quét an toàn theo hướng phía lái xe và máy quét bảo vệ con người theo.
Nếu một người được phát hiện trong trường cảnh báo, hệ thống sẽ phản ứng trong một phần nghìn giây và giảm tốc độ của xe. Nếu một người đi vào gần hơn nữa, AGV sẽ dừng ngay lập tức. Các trường bảo vệ này hoạt động linh hoạt, chúng điều chỉnh theo tốc độ hiện tại của hệ thống xe được điều khiển tự động, tốc độ càng lớn thì trường cảnh báo và trường bảo vệ càng rộng và ngay cả khi gặp chướng ngại vật bất ngờ, các trường bảo vệ phản ứng bằng cách quét đường phía trước. AGV cũng được lập trình để thận trọng trong từng hành vi của chính nó. Nó phát ra tín hiệu hình ảnh và âm thanh khi nâng hạ hàng hóa hoặc khi lái vào kệ.
Ví dụ máy kéo tự động phát ra tín hiệu âm thanh trước khi tiếp tục và sau đó lái xe với tốc độ giảm trong năm giây đầu tiên. Cung cấp cho người điều khiển đủ thời gian để thoát khỏi xe rơ moóc, hệ thống xe được điều khiển tự động cũng luôn sử dụng cùng một tuyến đường lái xe không bao giờ làm lệch hướng chiếc xe tự động đi kèm với một vài quy tắc nhỏ.
Tính năng suất khi sử dụng xe tự hành AGV
Vận chuyển vật tư
AGV thường được sử dụng để vận chuyển nguyên liệu thô như giấy, thép, cao su, kim loại và nhựa. Bao gồm vận chuyển nguyên liệu, vật tư sản xuất từ khi nhận đến kho, và giao nguyên liệu trực tiếp đến dây chuyền sản xuất.
Chuyển động trong quá trình làm việc là một trong những ứng dụng đầu tiên sử dụng phương tiện tự động có hướng dẫn sử dụng và bao gồm chuyển động lặp đi lặp lại của vật liệu trong suốt quá trình sản xuất. AGV có thể được sử dụng để di chuyển nguyên liệu từ kho đến dây chuyền sản xuất / chế biến hoặc từ quy trình này sang quy trình khác.


Tính năng suất khi sử dụng xe tự hành AGV
Vận chuyển pallet
Di chuyển pallet là một ứng dụng cực kỳ phổ biến đối với AGV vì sự chuyển động lặp đi lặp lại của pallet rất phổ biến trong các cơ sở sản xuất và dây chuyền lắp ráp. AGV có thể di chuyển pallet tới mọi vị trí trong nhà máy.
Vận chuyển thành phẩm
Chuyển hàng hóa thành phẩm từ vị trí sản xuất sang kho lưu trữ hoặc vận chuyển là sự chuyển động cuối cùng của vật liệu trước khi chúng được giao cho khách hàng. Những chuyển động này thường yêu cầu xử lý vật liệu nhẹ nhàng nhất vì các sản phẩm đã hoàn thành rất dễ bị hư hỏng nếu có va chạm trong quá trìn vận chuyển. Bởi vì AGV hoạt động với điều hướng và tăng tốc, giảm tốc được kiểm soát chính xác, điều này giảm thiểu khả năng thiệt hại khiến chúng trở thành một lựa chọn tuyệt vời cho loại ứng dụng này
Vận chuyển dạng container
Tự động tải rơ moóc là một ứng dụng tương đối mới cho các phương tiện được điều hướng tự động và ngày càng trở nên phổ biến. Xe tự hành AGV được sử dụng để vận chuyển và tải pallet hàng hóa thành phẩm trực tiếp vào xe kéo tiêu chuẩn trên đường mà không có bất kỳ thiết bị bến tàu đặc biệt nào. Xe tự hành AGV có thể lấy pallet từ băng tải, giá đỡ và đưa chúng vào rơ moóc theo mẫu tải được chỉ định
Vận chuyển nguyên liệu dạng cuộn
AGV được sử dụng để vận chuyển cuộn trong nhiều loại nhà máy sản xuất bao gồm nhà máy giấy, máy in, báo, nhà sản xuất thép và nhà sản xuất nhựa. AGV có thể lưu trữ và xếp các cuộn giấy trên sàn, trong giá đỡ và thậm chí có thể tự động nạp máy in bằng cuộn giấy.
Các công việc của xe tự hành AGV có thể được thực hiện trơn tru và an toàn nhờ sự kết hợp nhịp nhàng với các thành phần như băng tải công nghiệp robot 6 trục cấp hàng hệ thống cẩu trục, pallet, và kho thông minh. Tất cả sẽ đem lại một năng suất lao động cao nhất với chi phí thấp nhất giúp nâng cao sức cạnh tranh cho sản phẩm của bạn.
Kết luận
Trên đây là bài viết về các phương pháp điều hướng di chuyển và lợi ích của xe tự hành AGV. Nếu thấy bài viết hay và bổ ích thì đừng quên theo dõi Halana để biết thêm nhiều thông tin chi tiết. Cảm ơn bạn đã theo dõi!
Xem thêm: 5 xu hướng công nghệ sản xuất đáng xem








